
SmartPrince 2륜구동 로봇
77,000원
전방에 있는 초음파센서를 좌우로 스캐닝하여 장애물을 회피 주행합니다. 스테핑모터를 제어하여 좌우로 스캐닝하는 동작을 구현했으며, 주행은 DC모터 2개를 방향제어하여 이동합니다. 초음파센서에서 감지되는 장애물의 거리에 따라서 모터 회전속도가 제어됩니다. 장애물이 가까워지면 회전속도는 줄어들고 장애물이 멀어지면 회전속도는 빨라집니다.
배송비
-
기타 전달사항 입력:
품절된 상품입니다.
SmartPrince(똑똑한왕자) 2륜구동 로봇
전방에 있는 초음파센서를 좌우로 스캐닝하여 장애물을 회피 주행합니다.
스테핑모터를 제어하여 좌우로 스캐닝하는 동작을 구현했으며,
주행은 DC모터 2개를 방향제어하여 이동합니다.
초음파센서에서 감지되는 장애물의 거리에 따라서 모터 회전속도가 제어됩니다.
장애물이 가까워지면 회전속도는 줄어들고 장애물이 멀어지면 회전속도는 빨라집니다.
배터리 및 전원
배터리는 3.7V 2개를 직렬연결하여 7.4V가 인가됩니다.
배터리는 보드 하단부에 있는 배터리 팩에 장착됩니다.
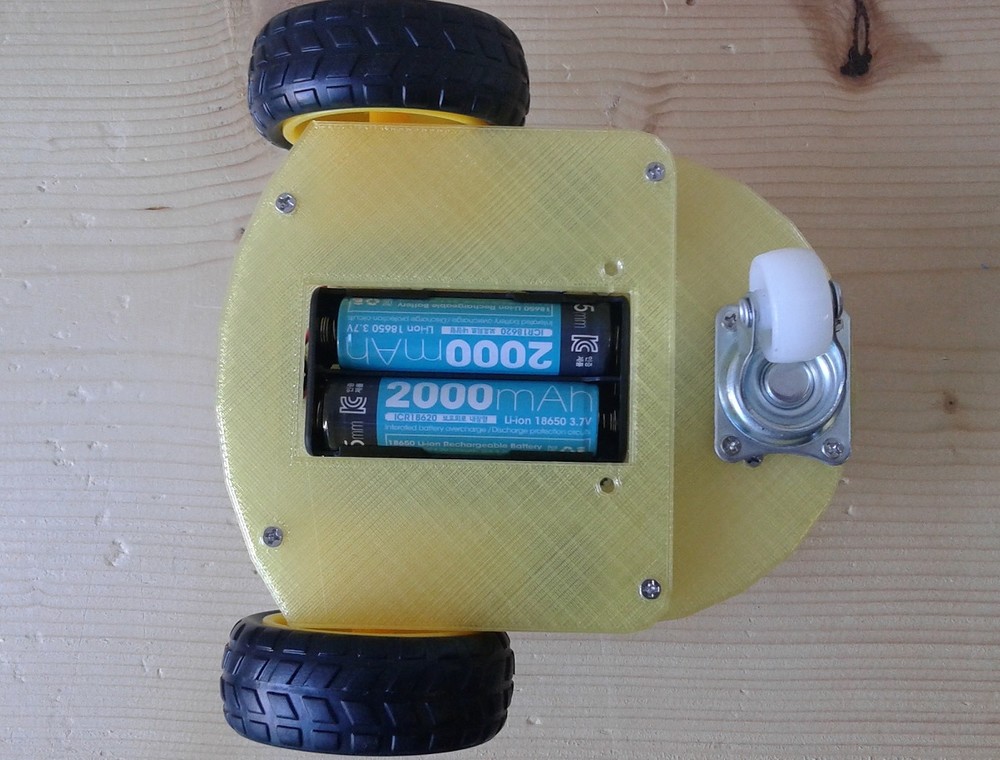
배터리는 분리하여 외부 충전기를 사용하여 충전합니다.
충전시간은 약3시간이며 동작시간은 약5시간입니다.

배터리와 충전기는 제품가격에 포함되어 함께 제공됩니다.
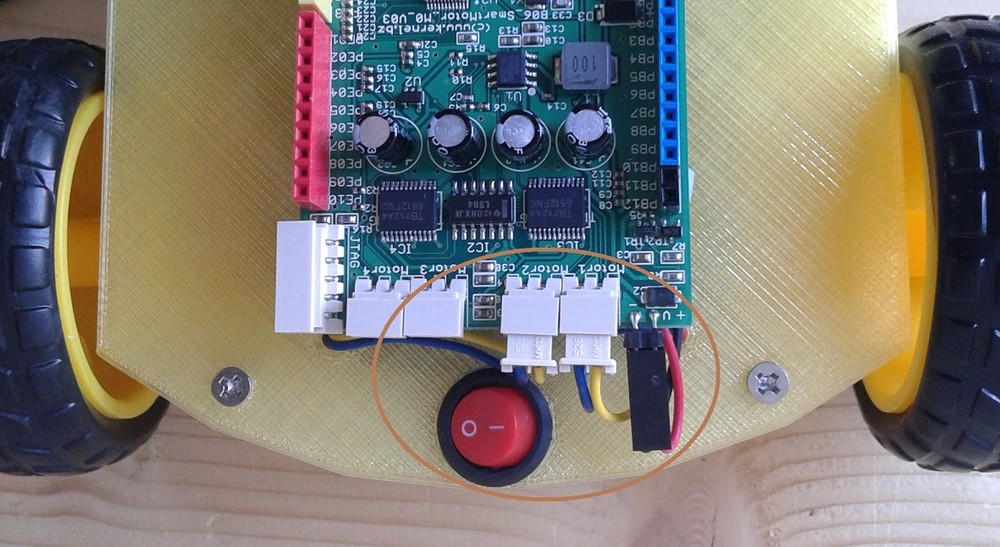
전원 스위치는 보드 상단 뒤쪽에 다음과 같이 있습니다.
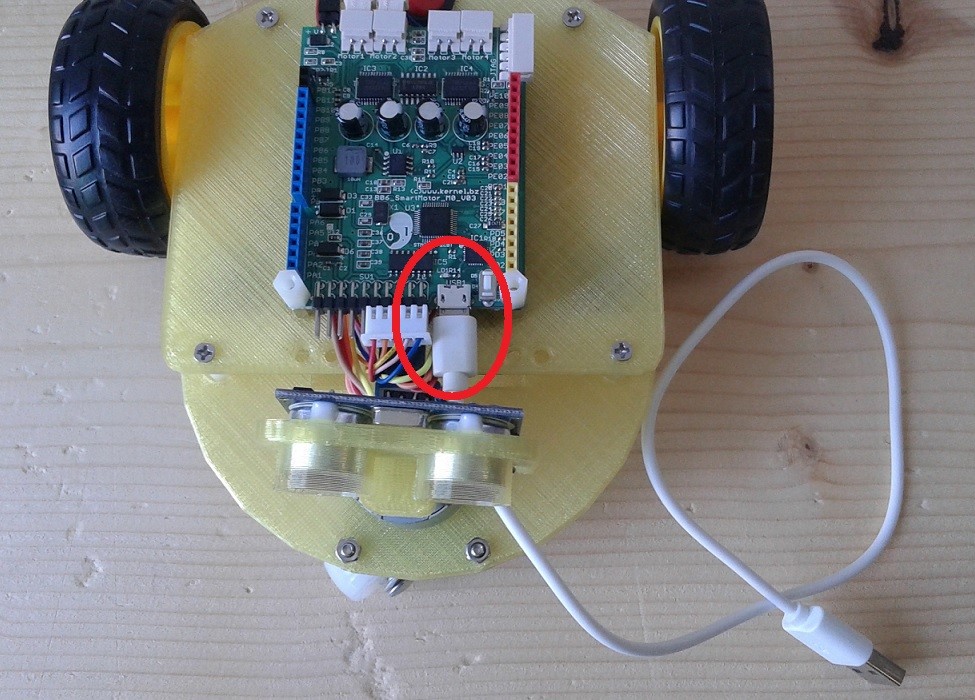
외부 전원(5V) 연결 및 실행은 다음과 같이 USB 케이블을 PC와 연결합니다.
USB에서 제공되는 5V 전원으로 충분히 동작하며, USB to Serial 메세지를 통하여
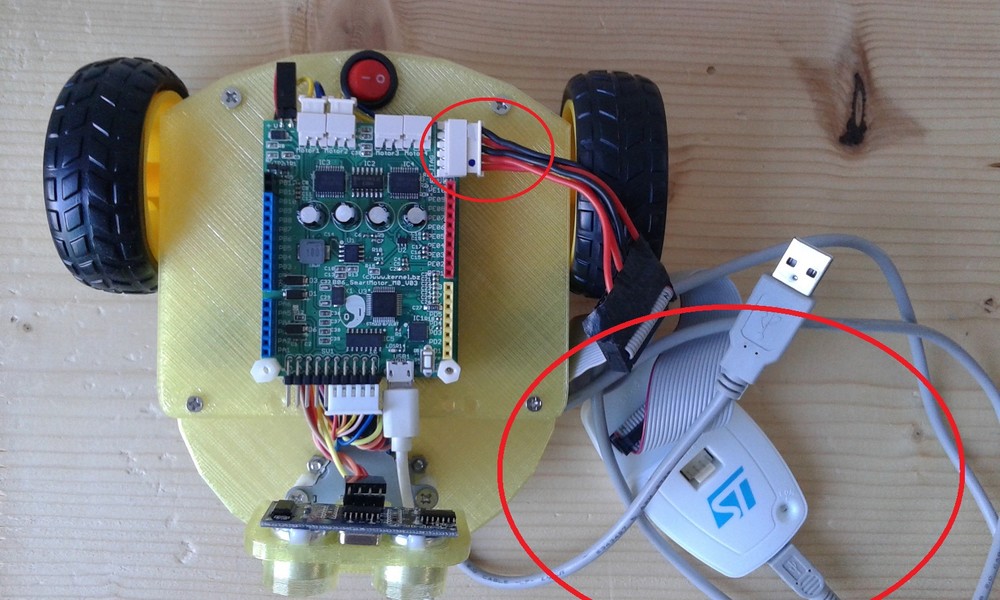
실행과정을 확인할 수 있습니다. 아울러 시리얼 명령(AT Command)으로 여러가지 기능을 테스트할 수 있습니다.
AT Command에 대한 자세한 내용은 아래의 똑똑한왕자 SmartMotor 모듈들 참조해 주시기 바랍니다.
똑똑한왕자 SmartMotor 참조 링크:
https://www.kernel.bz/blogPost/B06_SmartMotor
소프트웨어
소프트웨어는 SmartMotor 보드에 있는 ARM Cortex-M0을 제어하기 위해서 모두 C언어로 코딩했습니다.
소프트웨어 소스는 ARM Cortex-M에서 C언어로 코딩하는 방법에 대한 배경 지식이 많이 필요하므로
별도로 교육을 통하여 제공합니다.
제품 추가 구매 옵션에서 소스 및 교육을 신청하시면 하루 일정으로 조율하여 소스를 제공해 드리면서
소스에 대한 설명, 개발, 실행등에 대해서 알려 드립니다.
시연 동영상
감사합니다.
SmartPrince 2륜구동 로봇
77,000원
기타 전달사항 입력:
품절된 상품입니다.